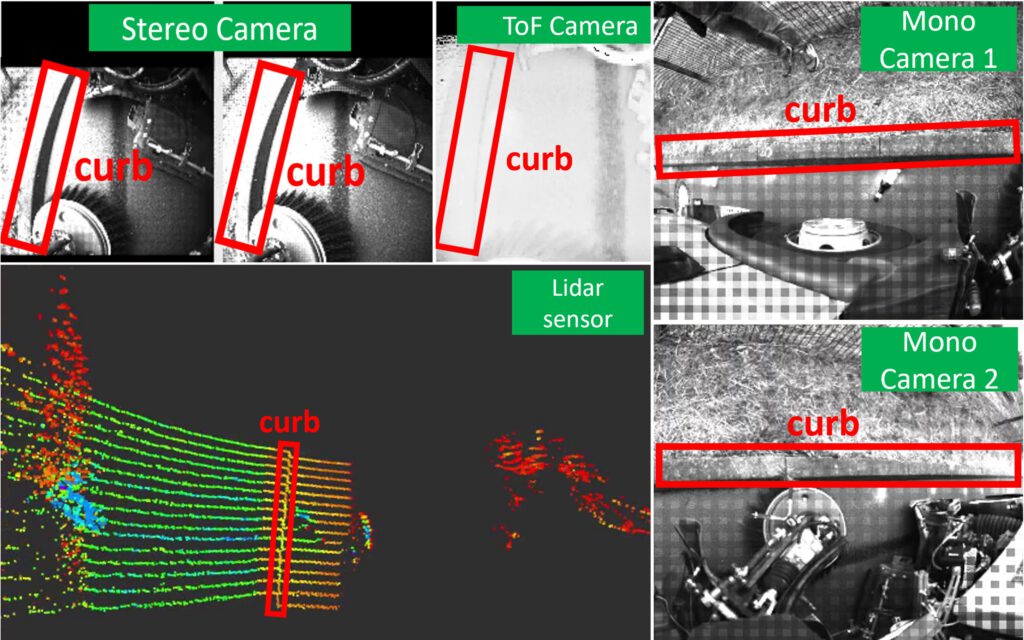
One of FusionSystems‘ main tasks in this project is the holistic detection of the environment in general and the road space in particular. For this purpose, we have developed a multiple sensor setup consisting of mono and stereo cameras, a time-of-flight camera and a lidar. This setup was installed on a test sweeper from our partner FAUN VIATEC and we conducted several test runs in the Summer of 2021. Based on the recorded data, we are developing several data analysis algorithms for object recognition. This will enable us to detect roadway boundaries such as curbstones. In a further step, the objects detected by the sensors are fused to obtain a correct image of the sweeper’s surroundings. This information forms the basis for controlling the actuators.


{kind=link}
{kind=link}