Uncategorized
6 Beiträge

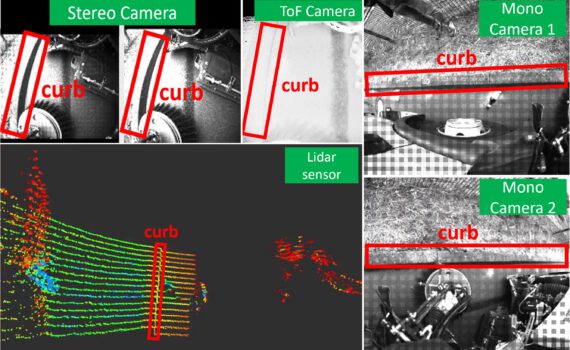
One of FusionSystems’ main tasks in this project is the holistic detection of the environment in general and the road space in particular. For this purpose, we have developed a multiple sensor setup consisting of mono and stereo cameras, a time-of-flight camera and a lidar. This setup was installed on […]

A piece of the puzzle to realising an automated sweeper is to answer the question “Where am I?”. This requires a new level of localisation performance – highly accurate, robust, always available and compliant with functional safety. NAVENTIK’s task is to provide exactly this with the PATHFINDER technology. Currently, a […]